저 로봇, 하는 일이 뭐야?

솔직히, 직장인 여러분. 그런 생각 해보신 적 있지 않습니까? “저 상사, 대체 하는 일이 뭐야?” 15일 대구 엑스코에서 열린 국제로봇전을 둘러보고 그런 생각이 들었습니다. 이 로봇이 언젠가 그런 말을 하겠죠. “아니, 저 인간. 대체 하는 일이 뭐야?”
커피 내리고 아이스크림 만들고 치킨 튀기는 로봇은 이제 좀 친숙하죠? 식당에서 서빙하고 공항에서 길 안내 하는 로봇 같은 것도요. 노동의 현장에 로봇이 빠르게 파고 들고 있습니다. 사람이 하는 일의 상당 수를 로봇이 거뜬히 해내고 있습니다. 어떤 로봇은 제자리에서, 또 어떤 로봇은 사람과 섞여 움직이면서 말입니다. 국제 로봇전 현장 모습을 둘러보시죠.
아이엠로보틱스

30년간 로봇 산업에 종사해온 조성엽 대표가 만든 아이엠로보틱스는 물류창고에서 쓰이는 파레트 운반 전용 자율주행 로봇(AMR) ‘아이소나’ 시리즈를 만든다. 이 로봇의 특징은 한 번에 1톤, 혹은 2톤 무게의 파레트를 옮길 만큼 강한 하중을 견딘다는 것이다. 로봇 자체의 무게가 대략 200kg이니 자신의 열배 무게를 거뜬히 든다. 조 대표는 “하중이 크므로 바닥과의 접지, 강성 문제 등을 해석해 최적의 솔루션을 만들고 있다”면서 “소형 물류쪽은 가격경쟁력이 센 중국업체가 많이 들어와 경쟁이 심하나 아이소나와 같은 고강성 로봇은 경쟁이 적고, 고객 역시 커스터마이징을 원하므로 자동차나 가전 부품 업체 등에서 수요가 있다”고 말했다.

두산로보틱스의 로봇팔과 자사 자율주행 로봇을 결합한 ‘이동식 협동로봇’ 시스템도 선보였다. 원래 협동로봇은 한 자리에 고정해서만 사용하도록 규제가 있었으나, 대구시에서 규제특구를 열어 이동식 협동로봇이 쓰일 수 있도록 했다. 자율주행으로 움직이는 로봇 위에 협동로봇이 올라타 있으므로 공장이나 물류센터 내에서 로봇 팔을 필요로 하는 곳으로 옮겨가며 일할 수 있게 됐다.

에바
전기차 충전 기술을 만드는 스타트업이다. 전시에는 자율주행 자동충전 로봇 ‘파키(parky)’를 선보였다. 자율주행 로봇이 커다랗고 귀여운 충전기를 태우고 충전을 필요로 하는 자동차에 가서 전기를 나눠주고 오는 방식이다. 전기차 충전 인프라가 충분치 않은 곳에서 쓰면 유용한 형태로, 평균적으로 완충된 파키가 두 대의 자동차를 배불릴 수 있는 정도의 능력을 갖췄다. 실내 위치 측정 기술을 탑재, 장애물을 회피하고 최적의 경로를 짤 수 있다.

에바 공동창업자인 김기재 부사장은 “파키는 배터리를 자체적으로 충전하면서도 급속으로 차량에 전기를 공급해야 하므로 충전속도를 올려 경제성을 올림과 동시에 전기적인 연결이나 기구적인 강도를 높이는 데 신경을 써야 했다”면서 “아파트나 마트 주차장 같은 곳에서 낮에 남는 유휴 전기로 파키가 충분히 충전한 후 수요가 많은 저녁에 효율적으로 활용할 수 있을 것으로 판단한다”고 말했다. 파키는 현재 제품을 개발 중이며, 시장에 잘 스며들 수 있도록 배터리의 가격을 낮추는 과제가 남았다.
에바는 화재 경보 기능을 추가, 업그레이드 한 전기차 충전 솔루션 ‘스마트 EV 차저 2023’도 전시했는데, 이 회사의 캐시카우다. 전기차가 권고되지만 쓰는 사람 입장에선 화재 사고에 대한 두려움이 있다. 내장된 센서가 불꽃 등을 감지하면 관리사무소로 신호를 보내 사고를 초기에 막을 수 있도록 한다.
엡손
프린터 회사가 여기에 왜 나왔나 했는데, ‘세이코엡손’라는 시계 브랜드를 갖고 있다. 시계는 매우 정밀한 기계고, 이 기계를 만들기 위한 산업용 로봇을 엡손이 직접 제작한다. 그러다보니 이 로봇을 다른 기업에 팔아도 손색 없다고 봤다. 팔이 수평으로만 움직이는 스카라 로봇과 전후좌우 어디로든 꺾을 수 있는 다관절 로봇팔을 모두 만든다.
스카라 로봇은 빠른 시간안에 물체를 구분한다. 물건을 쓱하고 보고, 싹하고 집어서 내려놓는 속도가 빠르다. 공기 흡착식과 집게 손 방식을 모두 붙여 활용할 수 있다. 여러 방향으로 팔을 꺾지 않는 대신 수평으로 움직이는 속도는 상당히 빠르다. 전시회에선 숫자나 글자, 동그라미 기호가 적힌 주사위를 빠르게 분류하는 동작을 충실히 해냈다.

프린터 회사이니 만큼 본인들의 강점인 ‘색을 구분하는 시연’도 했다. 카메라 비전 기술과 분광 카메라, 그리고 다관절 로봇이 하나의 시스템으로 결합된 형태다. 아래 사진을 보면 왼쪽이 불량품, 오른쪽이 양품이다. 왼쪽과 오른쪽 타일의 색이 미세하게 다른 걸 알 수 있다. 카메라 비전 기술로 타일을 알아보고, 로봇팔이 그걸 정확하게 집어든 후 분광 카메라 검사대에 옮겨 놓는다. 사람의 눈처럼 색을 구분할 수 있는 분광카메라가 ‘양품과 불량’의 기준에 맞춰 색을 분별하면, 그 결과에 맞춰 로봇팔이 타일을 옮긴다.

모빈
자그마한 로봇이 계단을 오른다. 야외 자율주행 로봇의 가장 큰 단점이 경사나 계단에서 움직이기 어렵단 것인데, 그 부분의 난점을 일부 해소했다. 왜 일부냐면, 저속의 저하중 몸체만 바퀴가 견딜 수 있어서다. 사진을 보면 알겠지만, 바퀴가 매우 유연해서 계단 모서리의 압력을 이겨내면서 모터로 밀고 올라갈 수 있다. 현재는 배달통을 달고 일부 아파트 단지나 리조트에서 활용 중이다.
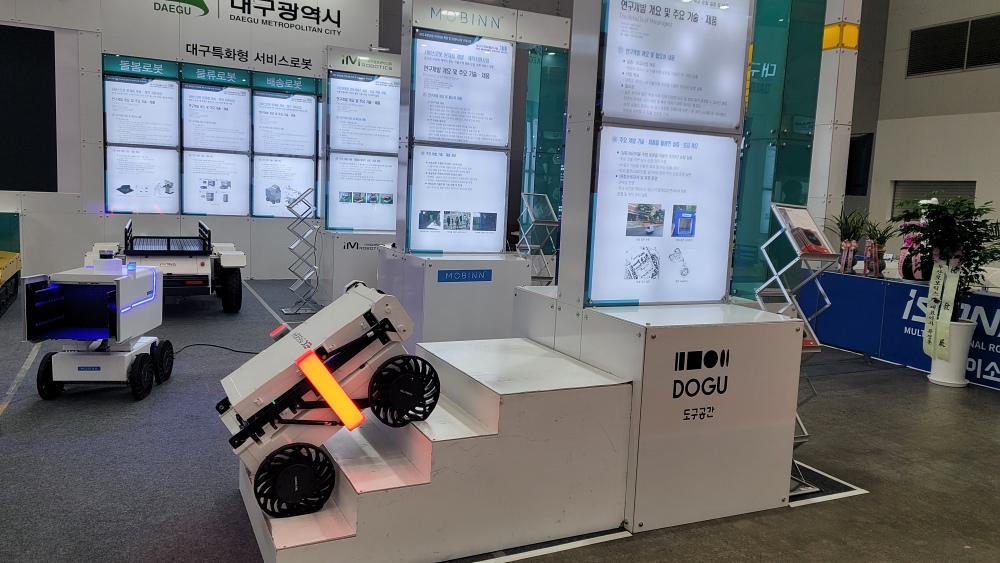
이 로봇은 현재 고속도로에서도 절찬 운영 중인데, 이 작은 녀석이 도로에서 뭘 할 수 있나 봤더니.

갑자기 허리를 쫙 펴면서, “여기는 사고 구역”임을 알린다. 한국도로공사의 요청에 의해 만들어진 로봇이다. 사고가 난 구역에 다른 차나 사람의 접근을 막기 위해 로봇이 투입, 안전 광고판 역할을 하는 것이다. 안전 관리 요원이 앱을 통해 로봇을 조정할 수 있다. 최진 모빈 대표는 “SUV 차량에 실을 수 있을 만큼 크기가 작을 것, 접이식 계단을 오르내릴 수 있어야 할 것, 비용이 저렴해야 할 것 등의 요구가 있었는데 이를 모빈의 로봇이 맞출 수 있었다”고 설명했다.
도구공간
안녕하세요? 인사하는 이로이는 순찰로봇이다. 도구공간은 보안에 특화한 AI 기술을 갖고 있는데 실내 순찰 로봇인 이로이는 현재 공장과 병원, 박물관, 주차장 등을 누비며 사람과 건물의 안전을 확인한다.

‘패트로버’라는 아웃도어형 순찰 로봇도 함께 공개됐다. 열악한 날씨에 야외에서 운행할 수있도록 만들어졌는데, 주로 공원이나 공장 등 실내외 현장에서 쓰인다. 3D와 2D, 라이다, 초음파 센서와 위험을 감지하는 보안 AI 센서를 달았다. 화재나 쓰러짐, 침입자, 안전모 착용 여부와 혼잡도 등을 포착해 관재실에 알린다. 옵션으로 소화기 분사 기능을 보유, 화재 초동 진압을 할 수 있는 능력을 갖췄다.
HD현대로보틱스
사진을 보면 싸우는 것 같아 보이지만 사실은 협동하는 거다. 지금은 협동로봇을 만드는 회사가 많아졌으나, 원래 산업로봇 시장에서는 HD현대로보틱스의 업력이 길다. 생긴 게 비슷한데 산업로봇과 협동로봇이 뭐가 다르냐 물으신다면, 산업로봇은 훨씬 더 큰 하중의 제품을 들어올리기 때문에 사고의 위험이 있다. 그래서 사람과 협동하지 않고 별도로 분리되어 쓰인다. HD현대로보틱스 측은 최근 협동로봇 시장에 진출하기 위한 제품을 만들고 있으며, 기존의 협동로봇보다 10kg 정도 더 무거운 30kg 짜리 부품을 들어올릴 수 있는 정도의 강한 협동로봇으로 차별화를 꾀한다고 설명했다.

짐로보틱스
로봇이 꼭 여러 기능을 태워 값비쌀 필요 있나. 제 역할만 하면 되지. 요즘 각종 센서와 자율주행 기술이 많이 나오는데, 짐로보틱스의 ‘짐보’ 시리즈는 여러 기술을 뺀 대신 저렴한 가격으로 솔루션을 공급하는데 초점을 맞췄다. 사진에 표시해뒀는데, 작은 네모난 센서를 사람이 쥐고 있으면, 선반에 고정된 센서가 그 신호를 받아 뒤를 쫒아간다. 센서끼리 신호를 확인해 움직이기 때문에 굳이 특정 하드웨어를 고집할 필요가 없어서, 기존에 갖고 있던 선반이나, 심지어 의자 같은 데다가도 붙여서 쓸 수 있다.

삼익THK
로봇전 옆에선 기계전이 열렸는데 삼익THK가 대규모 부스를 차려 관람객의 눈길을 끌었다. 산업에 쓰이는 여러 로봇이 나왔는데, 아래 사진은 그중 반도체 공장에서 쓰이는 것이다. 자동화 공정이 적용된 반도체 공장에서 로봇이 웨이퍼를 어떻게 나르는지를 압축해서 보여준다.

CMES
이미 용접을 위한 협동로봇은 시장에 여럿 나와있다. CMES가 하려는 건 보다 자유로우며 정밀도를 요하는 수준의 용접이다. 기존에는 용접 로봇이 안전 등의 문제로 딱 정해져 있는 경로를 따라서만 용접을 했다. 정해진 솔루션 안에서 정해진 길을 따라 로봇팔이 움직였다. CMES는 비전 기술을 활용, 용접 로봇의 움직임에 자유도를 주려 한다. 그래야지 용접 대상물이 원래의 예상과 다르게 조금 틀어져 놓여 있어도 그에 반응해 제대로 용접을 꼼꼼하게 할 수 있기 때문이다.

글. 바이라인네트워크
<남혜현 기자> smilla@byline.network