로봇은 어떻게 안전하게 목적지를 찾아갈까?
경기도 부천에서 서울 합정동으로 출근하는 남 모씨는, 집에서 나서기 전 지도앱을 켜고 오늘 아침 전철 출발 시간과 배차 간격을 확인한다. 통상은 신도림에서 환승하는 것이 합리적이나, 이것도 저것도 귀찮은 날은 서부간선도로가 막히는지 아닌지도 살핀다. 택시 찬스를 쓰기 위해서다. 목적지에 제시간까지 안전하게 도착할 수 있다면 오케이. 어디론가 향하는 이들은 대략 비슷한 패턴의 행동을 보이게 마련이다.
사람만 그런 것은 아니다. ‘이동’에 대한 개념은 자율주행차나 로봇(이하 편의상 ‘로봇’으로 통칭)에도 마찬가지로 적용된다. 출발지와 목적지를 인식하고 이동 경로 계획을 짠 뒤 움직인다. 멀게 볼 필요도 없다. 최근에는 종종 식당에서 음식을 나르는 로봇을 마주하기도 하고, 호텔에서 물품을 배달하는 로봇도 구경하게 된다. 이 로봇들은 사람들이 움직이는 동선에서 함께 주행하며 정해진 목적지까지 배송 업무를 수행한다. 매일 마주치지는 않아도, 아주 낯설지는 않도록, 자율주행을 하는 로봇이 일상에 조금씩 들어오고 있다.
클로봇은 로봇이 실시간으로 이동 경로를 파악하고, 안전하게 목적지에 도착할 수 있도록 하는 기술을 개발하는 스타트업이다. 네이버와 현대자동차 등, 특히 자율주행 기술에 관심이 많은 회사들로부터 투자를 받은 곳이기도 하다.
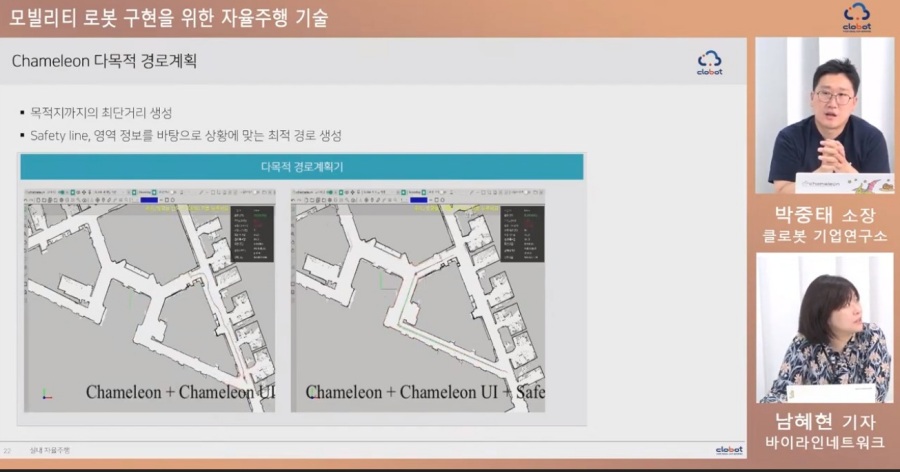
그렇다면 로봇은 어떻게 안전하게 목적지에 도달할 수 있을까? 구체적으로는 어떤 기술이 어떻게 적용될까? 관련 기술을 조금 더 자세히 알아볼 수 있는 자리가 마련됐다. 박중태 클로봇 기업연구소 소장은 최근 바이라인네트워크에서 주최한 ‘모빌리티 로봇 구현을 위한 자율주행 기술’ 웨비나 발표에서 로봇의 이동 경로에 적용되는 ‘SLAM(Simultaneous Localization and Mapping)’이라는 기법을 소개했다.
로봇 역시 사람과 마찬가지로 지도를 본다. 다만, 그 지도를 인식하는 방법이 사람과 조금 다르다. 로봇 전용 내비게이션과 지도가 필요한데, 클로봇은 여기에 핵심역량을 가진다. SLAM은 쉽게 말해서 로봇이 자신의 내비게이션 지도를 실시간으로 빠르게 만들어내는 기법이다. 로봇이 주변환경을 인식해 지도를 작성하는 동시에, 작성된 지도 안에서 자신이 어디쯤위치하는지를 빠르게 인식하는 기술을 뜻한다.
박중태 소장은 이와 관련해 “로봇이 자신의 위치추정과 지도작성을 동시에 해야 한다”며 “지도를 잘 만들 수 있는 기술”이라고 SLAM을 요약했다.
클로봇이 SLAM 등 기술을 활용해 만든 자율주행 솔루션의 이름은 ‘카멜레온’이다. 서비스와 산업용 로봇에 범용적으로 적용 가능하도록 만들었다. 라이다와 비전, 관성 센서 등을 융합해 고정밀 위치 인식을 한다는 것이 특징이다. 또 SLAM으로 만들어진 지도의 노이즈를 없애고, 가지 말아야 할 영역을 만들어주는데다, 오차 범위를 줄어주는 등의 기능을 더했다.
이 회사 측에 따르면 카멜레온을 활용한 로봇의 정지 정밀도의 오차 범위는 실제 위치에서 플러스마이너스 10mm에 불과하다. 이동 정밀도의 범위 역시 20mm 안팎에 있다. 이 말인즉, 아주 로봇이 지도를 따라 움직일 때 이동경로에서 벗어나는 범위가 미세하다는 것이다.
실제 카멜레온 기술은 병원이나 레스토랑에도 도입된 로봇에도 적용이 되어 있다. 사람들이 가장 많이 모여 있고, 동선이 복잡한 곳이며, 중요한 일의 우선순위가 실시간으로 바뀌는 곳이라는 점에서 로봇 운행의 복잡도가 높은 곳이다.
박중태 소장은 “아픈 환자가 다니는 곳에서 로봇이 굳이 그 앞을 비집고 다녀서도 안 되고, 휠체어 등 다양한 이동수단이 있는 곳이 병원이므로, 로봇 토입을 위해서는 토탈 솔루션이 필요해보인다”며 “통합된 자율주행 솔루션을 활용하는 것이 좋을 것”이라고 말했다.
글. 바이라인네트워크
<남혜현 기자> smilla@byline.network