
자유도 10의 관성 센서, 어떻게 구현할까?
[기고] 폴 골라타(Paul Golata) 마우저 일렉트로닉스(Mouser Electronics) 선임 기술 스페셜리스트
과거 전자기기, 비디오 게임, 휴대기기 같은 것들이 없던 시절, 아이들은 구슬치기, 딱지치기, 카드게임, 팽이와 같은 장난감을 주로 가지고 놀았다. 당시에는 그저 장난감이었지만, 자세히 살펴보면 전부 기술적인 원리가 들어가 있었다.
[무료 웨비나] 아이덴티티 보안 없는 보안 전략은 더 이상 안전할 수 없습니다
◎ 일시 : 2025년 7월 15일 (화) 14:00 ~ 15:30
◎ 장소 : https://bylineplus.com/archives/webinar/53537
그 중에서도 오늘 언급하고 싶은 장난감은 팽이다. 팽이는 바닥에 대고 굴려서 빠르게 회전시켰다가 손을 놓으면, 스스로 한동안 꼿꼿하게 회전한다. 이 팽이처럼 선회 운동을 실험하기 위한 도구가 있는데, 이를 자이로스탯(gyrostat)이라고 한다. 자이로스탯 하부에 고속으로 회전하는 베어링으로 몸체를 회전시키면, 그 힘으로 한동안 똑바로 서 있을 수 있다.
이 자이로스탯의 상부에서는 회전체의 역학적인 운동을 관찰할 수 있다. 이를 관찰할 수 있는 기구를 자이로스코프(gyroscope)라고 한다. 자이로스코프는 회전하는 동안에 각 운동량을 보존함으로써 수직 자세를 유지한다. 이 자이로스코프의 특성을 활용하면 방향과 각속도(angular velocity)를 측정할 수 있다.

MEMS
이 자이로스코프의 개념은 오늘날 첨단기기에 탑재되는 관성센서에도 적용된다. 이러한 센서에는 MEMS(Microelectromechanical system) 기술이 적용된다. MEMS란 미세전자기계시스템으로, 나노 기술을 이용해 제작되는 기계를 말한다. 이 MEMS 기술은 여러 종류의 센서들과 소프트웨어를 한 곳에 통합하여 센서 융합을 구현하는 데 사용될 수 있다. 이는 곧 정보통신기술(ICT), 사물인터넷(IoT), 자동차와 같은 다양한 분야에서 중요한 역할을 한다.
MEMS 센서는 인간의 감각을 대체하는 수단으로도 사용된다. 대표적인 사례 중 하나가 TDK의 인벤센스(InvenSense)다. TDK의 인벤센스는 MEMS 기술을 기반으로 한 첨단 모션, 오디오, 압력 센서 제품들을 제공하는데, 컨슈머, 산업용, 자동차, IoT 시장에 주로 사용된다. 여기에는 3/6/7/9축 모션 센서, 고성능 오디오 마이크로폰, 압력 센서도 포함된다. TDK는 계속해서 성능과 품질의 한계를 끌어올리고 업계의 새로운 기준을 제시하면서 다양한 분야의 혁신을 촉진할 전망이다.
IMU
MEMS 기술을 활용하면 정밀 자이로스코프, 가속도계, 자기계, 압력 센서를 하나의 디바이스로 통합한 다축 조합 구성을 할 수 있다. 이렇게 통합한 것을 IMU(inertial measurement unit, 관성측정장치)라고 한다. IMU를 사용하면 물체에 가해지는 힘, 각속도, 방향 등을 측정할 수 있다.
뉴턴은 관성을 운동의 제1법칙이라고 정의하면서 “모든 물체는 외력이 없을 경우, 정지한 물체는 계속해서 정지해 있고 운동하는 물체는 같은 방향과 속력으로 계속 운동한다”라고 기술한 바 있다. 여기에 MEMS 기술을 더해 IMU를 구현하는 것인데, 여기에서 MEMS 기술은 극히 복잡한 애플리케이션과 동적 조건에서도, 다중의 자유도(degree of freedom, DoF)를 신뢰성 있게 검출하고 처리할 수 있도록 한다.
다중 자유도
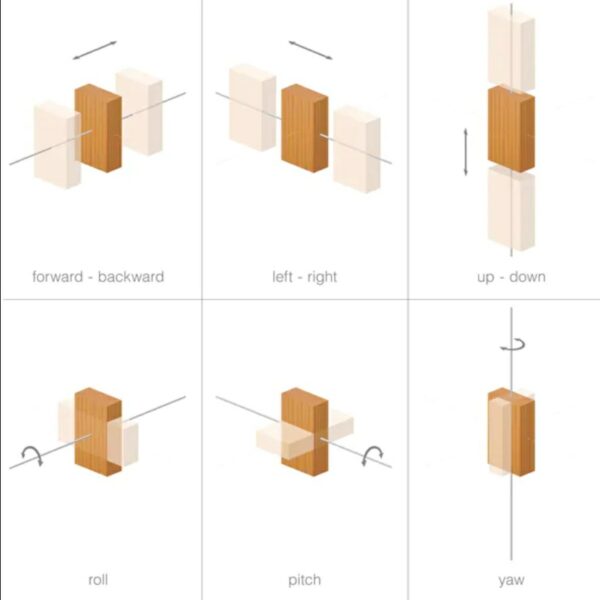
IMU를 선택할 때, 중요하게 고려해야 하는 것은 자유도다. 여기에서 자유도는 기계적 범주에서의 자유를 뜻한다. 역학에서 ‘자유도’는 한 물체가 이동하고 회전하는 상태나 구성을 정의한 것을 말한다. 예를 들어 한 공간 속에 있는 물체의 자유도는 ▲전·후 ▲좌·우 ▲상·하 ▲종축으로 회전 ▲횡축으로 회전 ▲수직축으로 회전, 이렇게 6가지로 나타낼 수 있다.
IMU의 자유도는 통상적으로 2부터 10까지 표현한다. 6 이상의 자유도는 어떻게 나타낼 수 있을까? IMU 제조사들은 다른 종류의 센서를 추가함으로써 성능 향상을 이룰 수 있다는 것을 발견했다. 센서를 추가해 판독 능력을 향상하고, 오차를 낮추고, 추가적인 데이터를 사용해 내부적으로 조정하거나 보정할 수 있다. 예를 들어 자기계를 사용해 지구 자기장 요소를 추가할 수 있는 것이다. 가속도계와 자이로스코프에 자기장을 중심으로 한 상·하·회전 정보를 추가하면, 3의 자유도를 늘릴 수 있다. 따라서, 자유도 9의 IMU가 탄생한다.
10의 자유도를 구현하기 위해서는 또 다른 센서를 추가하면 된다. 10의 자유도를 구현할 때에는 기압 센서를 추가해서 추가적인 정보를 제공할 수 있다.
맺음말
전자장비가 발전할수록 더 많은 센서들이 사용된다. 센서 융합은 여러 센서들과 소프트웨어를 결합해 ICT, IoT, 자동차 같은 애플리케이션에서 새로운 기능을 구현한다. 이 글에서는 IMU가 어떻게 여러 센서들을 단일한 모놀리식 디바이스에 결합할 수 있는지 설명했다. 엔지니어들은 앞서 언급한 TDK 인벤센스같은 관성 센서를 통해 IMU의 이점을 최대한 활용한 제품을 설계할 수 있을 것이다.
글. 폴 골라타(Paul Golata) 마우저 일렉트로닉스(Mouser Electronics) 선임 기술 스페셜리스트