네이버가 도대체 왜 로봇을 만드는가

“돈이 별로 없다. 크게 투자를 받긴 했지만 어느 정도 돈이 들지 예상 못했다. 직접 제품을 만들다보니 삼성전나 LG전자 같은 큰 회사에서 하는 업무를 하고 있다. 하드웨어를 알아가는 과정이 너무 힘들었다. 처음에는 칩 하나를 샘플로 못 받을 정도로 시작했다. 지금은 큰 회사들과도 어느정도 신뢰를 쌓았다.”
네이버랩스가 기술개발 전념을 목표로 네이버로부터 독립한 지 1년이 지났다. 송창현 네이버랩스 대표이자 네이버 최고기술책임자(CTO)는 13일 오후 서울 강남구 D2스타트업팩토리에서 ‘네이버 테크 포럼’을 열고 지난 1년간의 소회를 이렇게 말했다.
네이버랩스의 기치는 ‘생활환경 지능’이다. 사용자의 상황이나 사용자 자체를 잘 인지해서 사용자가 요구하지 않아도 필요한 서비스를 적지적소에 제공하겠다는 목표를 내걸었다. 방법적으로는 인간의 일상에 녹아들 로봇과 자율주행차 개발이다. 이 둘은 아주 중요한 미래 먹을거리지만 지금 당장으로선 수익을 내진 못한다.
게다가 네이버의 경우 1년 전만 하더라도 이 분야에선 ‘듣보잡’이었다. 송 대표의 말처럼, 웬만한 파트너들은 네이버랩스를 만나주지도 않았다. 그런데 1년 사이 괄목할 행보를 보였다. 구글지도의 대안이라 불리는 ‘히어’와 파트너십을 맺어 외신에 실리기도 하고, 자율주행과 관련한 논문도 꽤 발표했다. 로봇 쪽 실력자들도 네이버에 속속 합류했다.
이날 포럼에는 랩스에서 각각 로보틱스 조직과 자율주행차 조직을 맡고 있는 석상옥 리더와 백종윤 리더가 함께 했다. [바이라인네트워크]는 로봇과 자율주행을 각각 나눠, 네이버가 어떤 고민을 갖고 제품을 만들고 있고, 현재 어느정도 수준으로 기술을 발전시키고 있는지를 살펴봤다.
■네이버는 왜 로봇을 만드는가, 에 관한 고민
네이버의 고민은 사람과 로봇의 인터랙션에 관한 이야기다. 네이버가 왜 로봇을 만드느냐는 질문을 적잖이 받는다. 네이버의 목표는 뚜렷하다. 인간의 삶에 들어와 인간의 인간의 요구사항을 알아서 해결해주는 로봇. 그 작은 시작은 인공지능 스피커인 ‘클로바’다. 이미 로봇은 알게 모르게 일상에 녹아들고 있다. 네이버가 PC나 스마트폰의 검색창에 매몰되어 있다면 미래는 없다.
■네이버, 왜 지도만드는 로봇부터 시작했나
석상옥 리더의 표현에 따르면 네이버랩스의 고민은 “적은 비용을 들여 얼마나 효율적인 로봇을 만드는가”이다. 비용적인 측면은 중요하다. 비싸면 만들기도 어렵고, 보급도 어렵다. 적은 자원으로 만들 수 있는 가장 효율적인 로봇은 무엇일까? 모든 로봇의 기초가 되는 로봇은 무엇일까?
■M1, 동선을 그린다
석 리더는 “공간과 공간에서 서비스를 하는 로봇이 가장 먼저 알아야 하는 것은 사람이 사는 공간”이라고 말했다. 인간이 움직일 때를 생각해보자. 방에서 화장실까지 가기 위해서 가장 먼저 사람은 머리 속에 동선을 떠올린다. 대략적인 집 구조를 알아야 하고, 내 현재 위치와 화장실의 위치, 그리고 그 중간 중간 놓인 장애물을 알아야 한다. 로봇도 마찬가지다. 움직이는 로봇을 위해선 지도를 만들어야 한다. 그렇게 생긴 로봇이 네이버 최초의 로봇, M1이다.

M1은 비싼 로봇이다. 주변 환경 이미지를 고해상도로 촬영할 360도 카메라를 달았다. 시중에 나온 360 카메라로는 원하는 만큼의 해상도를 얻을 수 없어서 상용화 된 센서 중 좋은 것을 사다가 사각없이 촬영할 수 있는 제품을 네이버랩스에서 직접 개발도 했다. 자율주행차에 들어가는 라이다도 달았고, 3차원 레이저 스캐너도 탑재했다. 이래저래 비싼 센서들을 많이 넣었다. 이를 통해 높은 정밀도의 공간 데이터를 만들었다.
■어라운드, 보급형 지도 로봇
M1이 아무리 좋은 지도를 만들었다고 하더라도 비싸다면 보급이 어렵다. 네이버는 이를 해결할 방법으로, M1이 만든 지도를 클라우드에 저장해놓고, 이를 다운로드 받아 움직일 수 있는 저가형 로봇 ‘어라운드’를 개발했다. 어라운드가 M1이 만든 지도를 바탕으로 자기 위치를 파악해서 목적지까지 찾아가는 시스템이다. 정밀하게 지도를 만들 필요가 없으니 저렴한 센서가 들어갔다. 샤오미 로봇 청소기에 들어가는 센서나 웹캠에 들어가는 카메라 같은 것들이다.
물론, 어라운드도 지도를 만든다. 상점이 바뀌었는지 열었는지 닫았는지 등의 업데이트를 할 수 있다. M1의 보완재 역할이다. 쇼핑몰 같은 곳에서는 실시간 상점 정보가 지도에 반영되는 것이 중요한데, 실내 자율주행 로봇으로서 어라운드가 실시간 정보 업데이트의 역할을 하는 것이다.
석 리더는 “저가형 센서로는 에러가 많이 쌓여 자율주행이 어렵다”면서 “M1의 고가 센서로 좋은 지도를 만들고, 저렴한 로봇인 어라운드가 M1의 지도를 이용하게 만들자는 작전”이라고 설명했다.
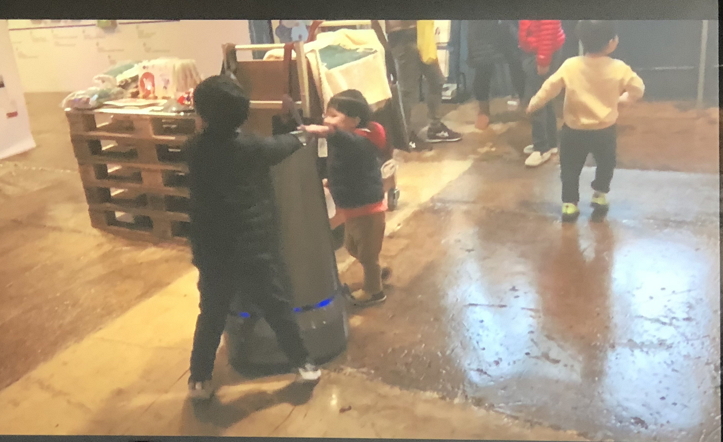
실제로 어라운드는 예스24 같은 서점에서 활용키도 했다. 어라운드가 서점을 돌아다니면서 책을 수거하는 역할을 맡기도 했다. 다만, 현장에서 신기하다, 재밌다는 이유로 ‘인간들이 로봇을 괴롭히는 사례’가 종종 발생하는 관계로 어라운드는 잠시 실직한 상태다.
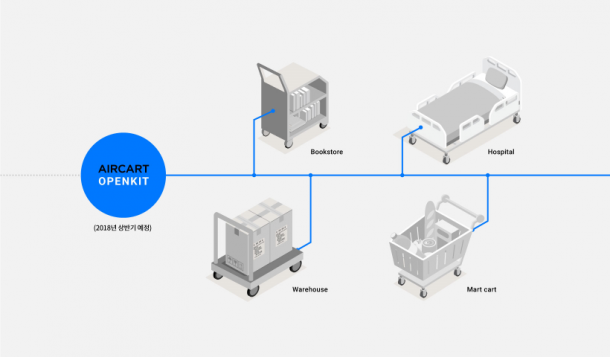
■에어카트
근력 증강 기술이 들어갔다. 그러니까, 힘센 팔을 얻는 기술이다. 무거운 과일을 나르는 동료를 보고 개발을 했다고 한다. 책이나 생수통 같은 무거운 물건을 쉽게 나를 수 있는 카트인데, 자동 브레이크 기능을 넣어서 급정거시 안전도 도모했다. 인턴이 만들었는데, 이걸 개발한 그 인턴은 현재 하버드의 근력 증강 연구실로 유학갔다.
■전동 보드
흔히 타는 스케이트 보드와 유사하게 생겼는데, 보드 위 아래에 모두 기울기 센서가 들어갔고 모터가 달렸다는 점이 다르다. 바퀴 네개의 사륜구동이며 기울기 차이를 이용해서 전진한다. 석 리더의 말로는 “나를 넘어지게 하지 않는다고 보드를 믿으면” 잘 탈 수 있다.
■교육용 거북이 로봇
애들이 하도 현장에 보급된 로봇을 괴롭히니까, 로봇과 공존을 가르치기 위해 만들었다. 아이들이 거북이 로봇 등을 쓰다듬으면 좋다는 듯이 반짝 거린다. 그런데 만약 이 로봇을 때리면 거북이 목이랑 다리가 껍질 안으로 숨어버린다. 싫다는 신호다. 이걸 접한 아이들은 나중에 다른 친구들이 로봇을 괴롭힐 때 말린다. 어느 정도 효과가 있다는 교훈.
■사족 보행 로봇, 치타3
네발로 껑충 껑충 뛰어다니는 사족 보행 로봇이다. 원래 ‘치타’는 석 리더가 MIT 유학시절 과제로 만들었다. 석 리더가 만든 것은, 러닝머신 기계위에서 뛰는 치타1이었고, 그 뒤를 이은 후배 연구자가 야외 활동을 하는 치타 2를 만들었으며, 지금은 네이버랩스가 펀딩해서 치타3를 개발 중이다.
평소엔 걸어다니고, 서서 작업을 할 수 있으며, 40kg 본체 무게에 10kg 까지 물건을 집을 수 있도록 연구한다. 치타 로봇 몸에 60개의 센서가 들어 있으며 12개 모터가 달렸다. 제대로 뛰려면 1초에 4000번을 연산해야 제대로 동작한다. 그만큼 고도의 기술이 들어간다는 것이다. 조금만 계산이 느려도 치타의 착지가 잘못될 수 있다.

■로봇이 공간 인식해 물건 집기, 살몬 프로젝트
딥러닝을 이용한 로봇이다. 카메라가 물체를 인식하고, 라이다가 지도를 그리고 , 물체를 스마트하게 집는 것까지 역할한다. 여러 물체가 있을 때 어떻게 하면 효율적으로 물건을 집을지 로봇 스스로가 판단한다. 알파고를 만든 딥마인드에서 핑퐁 게임 노하우를 스스로 깨친 연구결과와 유사하다. 네이버랩스가 만든 이 로봇은 약 8만번의 딥러닝 결과, 공간 안에서 효율적으로 움직이며 무엇을 먼저 집을지 알고리즘을 짜는 방법을 스스로 터득했다. 이 기술은 카이스트에서 교재로 쓰인다.
■로봇 팔, 엠비덱트
사람 사는 공간에 들어올 로봇 팔이 없다는데서 이야기가 시작됐다. 로봇팔은 통상 무겁고 힘이 세서 사람이 부딪히면 다친다. 그래서 사람 팔처럼 가볍고(엠비덱트는 2.5kg에 불과하다), 자기 무게 만큼 들 수 있다(그간 로봇은 자기 무게의 5분의 1 정도 물체만 들 수 있었다).
어떻게 무게를 줄였느냐? 7개의 모터를 모두 어깨쪽으로 뺐다. 관절에 해당하는 부분을 모두 케이블로 연결했다. 관절이 움직일 때마다 케이블이 엉키지 않도록 신경 썼다. 석 리더의 말로는 “매우 변태적인” 연구였다. 자유롭게 움직이면서, 사람과 하이파이브를 할 수도, 악수를 할 수도 있다.

글. 바이라인네트워크
<남혜현 기자> smilla@byline.network